


On to Next Page
Back to Front Page
©2000 Derek Young
|
Complete Control - Part 3 Next up was the armour development and because I was running out of time, all the other finishing touches. The total time from design to completion took about 3 months, with the gross majority of the work happening in the last 3 weeks. |
|
|
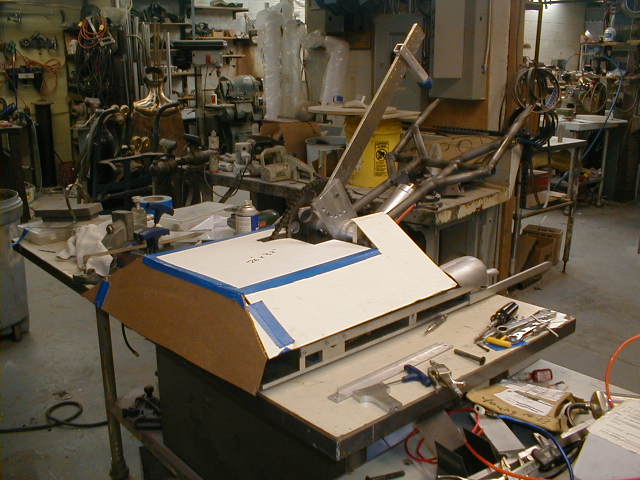
The armour was mocked up in cardboard and tape. The front wheel covers are flour scoops. This idea came from my boss, Booth, who is a never ending fountain of novel ideas for robots and their visual designs. | |
|
|
Back end of the fake armour. Cardboard isn't generally accepted as a good armour material, so I decided to remake it out of Lexan. | |
|
|
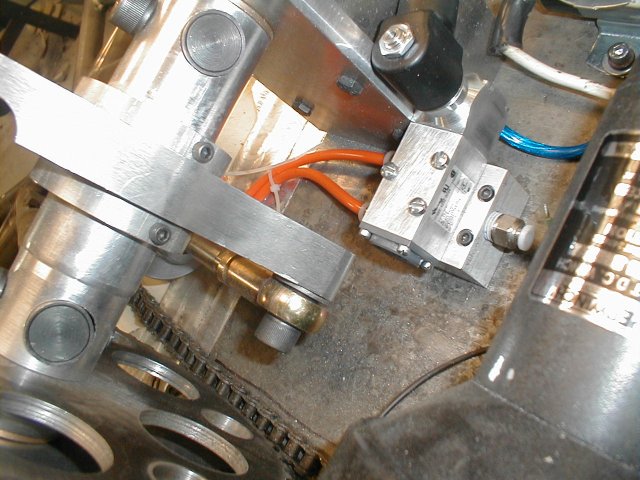
Close up of the cylinder connection and the pneumatic valve. The valve was rated to 175 PSI, so I run it at 175. It produces close to 900 lbs of force, so the hardware is suitably beefy. | |
|
|
One of the nicer heatbends that I managed to produce. Bending 3/16" lexan without it bubbling take far too much patience than I have. I was willing to put up with some bubbles. The Lexan does double duty as a battery retainer, as I ran out of space to put a strap across the top of them. | |
|
|
The robot right after a nearly finished test drive around the shop. During that test drive, I attempted to pick up a work bench. This was not a good idea. | |
|
|
The result of the lifting attempt. A slightly bent frame, and a very bent frame stiffener. These plate stiffeners were replaced with much stiffer angle aluminum strips. The frame was straightened out in a vise and the old stiffener was sent to the scrap bin. | |
|
On to Next Page Back to Front Page ©2000 Derek Young |