




|
March 8/2000 - Build Update 5 Big changes -- er... improvements are a foot. Last week the organizers of BattleBots announced that they are planning a competition in San Francisco in June. This really changed my focus, as now I have an event to build a 180 lb walker for. Have since decided to go ahead and build the full weapon version of Pressure Drop. This makes for a lot more work but in the end it should be worth it. Another source of change came while testing, I had the robot walking for the first time last week! I encountered a few problems though, the biggest being that the electric actuators I built just aren't going to cut it when the robot's fully loaded. They managed to move the ground bar up and down ok, but only while the robot was walking, and this us without a weapon. I have decided to go to a CO2 powered pneumatic setup instead. As Dan D. once said (I may be paraphrasing..) "Never pass on the opportunity to try a new technology".. and while CO2 pneumatics aren't new per se, they are new to me. I placed an order for some cylinders from C&H yesterday -- so wish me luck! - Derek. Suggested Listening During Early March Robot Building: ALL - Trailblazer Goldfinger - Self Titled The Muffs - Blonder and Blonder |
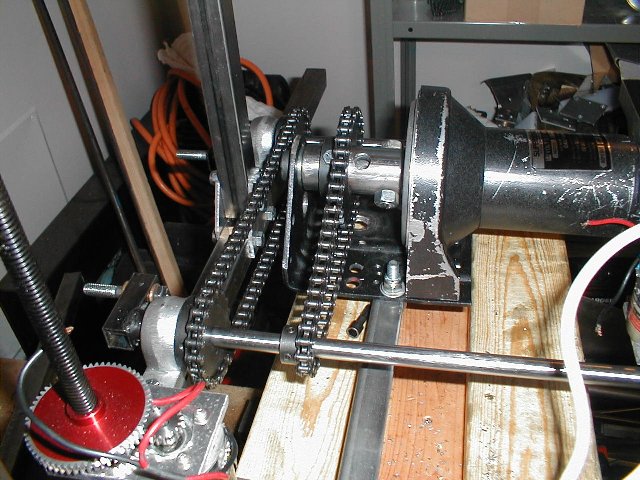
| The test drive motor, the winch that powered Son of Smashy's weapon. I had to cut the finger off it, and I bored out the sprocket shown there to fit on the shaft. |
|
Here the winch and sprocket are mounted up. After testing the legs at about 130 rpm I think I will not gear it up next time. I also have decided to get another winch so that I can use one for drive and one for the weapon re-loader. I don't think I can find anything that can compare to the power (1.3 hp) and weight (~13 lbs) and low output speed (45 rpm or so) of this winch. |
|
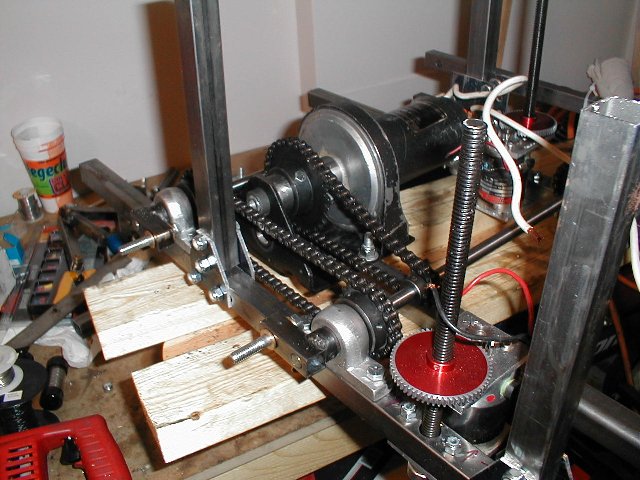
Another shot of the winch setup. During testing, I managed to bend the middle axle bad enough to cause the #35 chain to jump everytime the chain got slack. Oops. I'll have to replace the axle and I'll support it with another pillowblock near the drive sprocket. |
|
The robot just before it's first walking test |
|
And the robot just after it's first walking test. Notice that the legs are all out of phase. It seems that every single set screw (16 of them or so) loosened up immediately upon the first step and the whole thing got messed up. Damn. I spent the next evening with the Dremel grinding flat spots for every set screw to sit in (and I used plenty of Lock-tite). After that, no problems. |
|
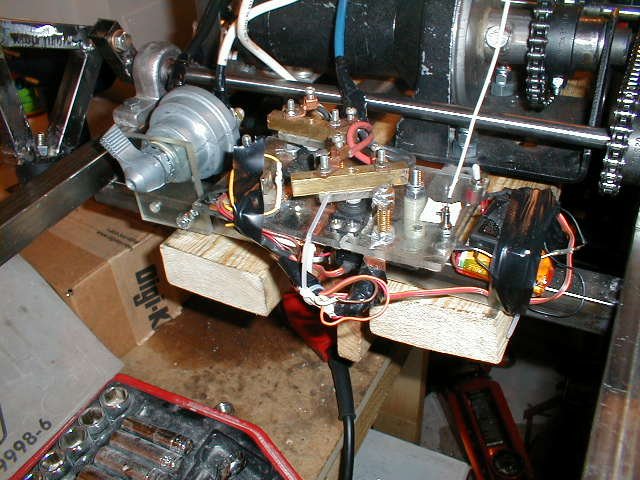
For further testing, I used the old weapon controller to power the drive motor on and off. I think I will build a bi-directional version of this to run the final setup too. Cheap and reliable. |
|
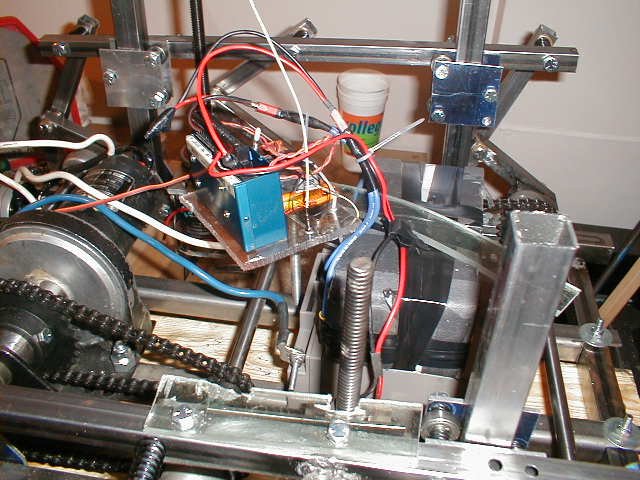
Yes, the mounting platform is a cheap hack, but the vantec was only up there for an evening. I used the RDFR22 to run the linear actuator during testing. As I said above, it worked, but not well enough, so they're out. |
|
Now was a good time to completely disassemble the robot again to expedite changes and improvements. I have sent the legs away to get fancied up while I was at it. |
|
Danko Jones, aka the Mango Kid. The best live act in Canada. If he comes to your town, go check him out. I saw him open up for Sloan last week. He personifies rock 'n roll. Great stuff. |
|