





On to Next Page
Back to Front Page
©2000 Derek Young
|
Complete Control - Part 2 The next big hurdle to get the robot running. The biggest part of this was the construction of the new gear reduction units for the bare Pittman motors that they replaced the broken gear motors with. |
|
|
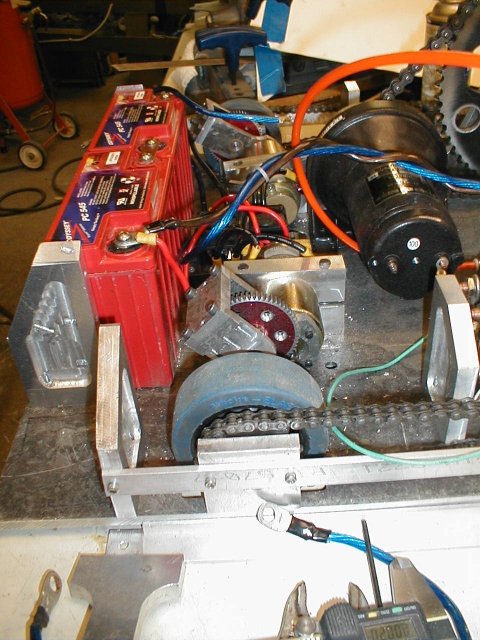
The business end of the robot getting a bit busier. New gear reduction units with motors in place, and things starting to get wired up. | |
|
|
I added a 3/16" thick aluminum bar down the side of the robot to stiffen up the chassis so it could deal with the serious loads of picking up other robots. You can also see the frame extensions off the front to prevent the robot from flipping forward when lifting. | |
|
|
The new simplified foot. You might recognize it as one of Pressure Drop's extremities. Yup, another Energy Suspension bump stop, threaded into a taped plate of aluminum that I TIG'ed to the end of a square 6061 tube. | |
|
|
Yeah.... This is what inspired the logo/t-shirt design. Ozzy! (and no, they're not football goal posts!) | |
|
|
The arm is now connected to the pneumatic cylinder. A 3/8" bolt runs through a set of 1/4" chromoly plates welded to the forks to retain the end of the cylinder. The other end of the cylinder was attached to a rod end which bolted up to the 7475 aluminum arm lever with a 1/2" bolt. | |
|
|
A close up of the new gearbox. The first stage is done with 24 pitch gears, the second with 16 pitch gears. All WM Berg stuff, which means it is really nice, but very spendy. The whole assembly is an obvious patch, as it doesn't look or fit as slick as the original setup. | |
|
|
My dual Innovation First installation. I thought I was being clever until it turned out that the bending of the auto-resetting fuses' tabs would render them, and then my speedcontrollers, useless (they went up in smoke on Thursday at Battlebots -- they were quickly replaced by the great guys at InvFirst). | |
|
On to Next Page Back to Front Page ©2000 Derek Young |