

|
May 29/2000 - Build Update 10 Robots, robots, robots... It's getting down to the crunch time to get everything finished before Battlebots. That's ok though, I think I am doing ok for time. I finished up all the electronics and have had the robot walking and turning via remote control. It takes on a lot of personality once it starts moving. Big thanks to Korey Kline who hooked me up with some CO2 regs and tanks to try out. Anyways, here are the pictures! - Derek. Suggested Listening During Late May Robot Building: Ween - White Pepper Porno for Pyros - Porno for Pyros Various Artists - In the Red Zone: The Essential Collection of Classic Dub |
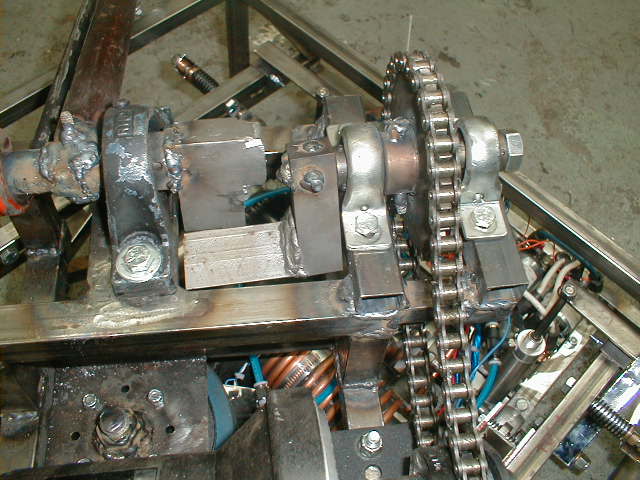
| First revision of the weapon loader. It turned out to be too flimsy. Notice how everything on the right looks a little bent? Yeah. 5/8" axle is NOT enough, nor are medium duty stamped pillow blocks. |
|
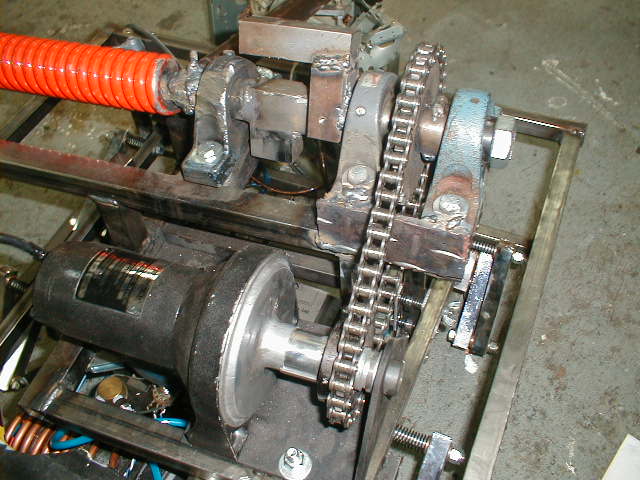
Revision two. This time, 1" axle and heavy duty (not to mention heavy) cast iron pillow blocks. The diamond plate had to be welded in as a stop for the pillow blocks so they wouldn't slide backwards. |
|
A little bit of weapons testing on an old VCR. No actual weapon yet, and that steel tube isn't going to stick around for much longer. |
|
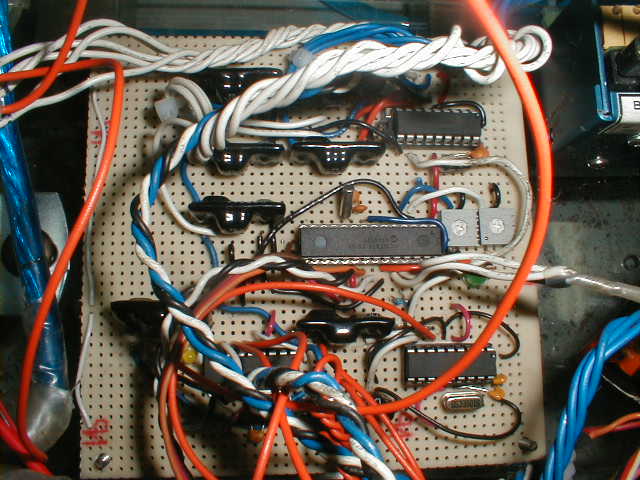
The finished electronics board. 4 on board PIC processors interfaced to 5 channels of my reciever, each one doing a separate task, leg control, drive motor control, turret control and weapon control. Those are fed to 8 solid state relays that run the solenoids that work the magic :) |
|
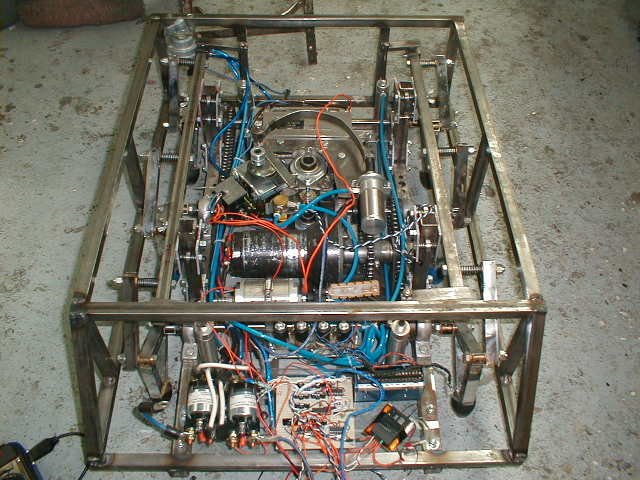
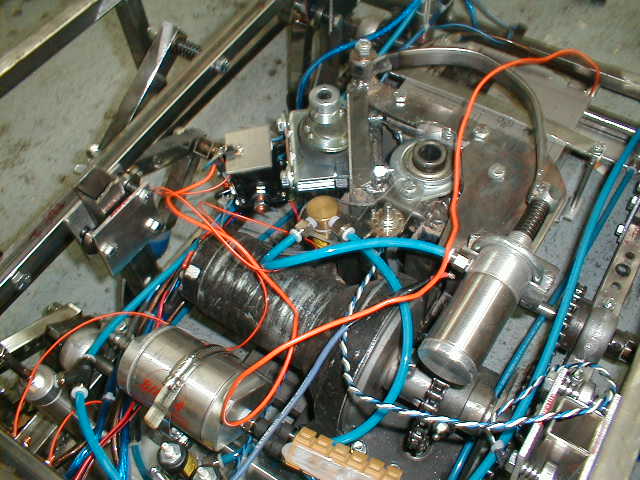
An current overview of the robot. The thing attached to the turret motor mount is the solenoid to run the weapon. You can also see the 2 large DPST solenoids near the front left, beside the electronics board. |
|
A detal of the afformentioned solenoid. I have run out of places to mount components, so I have begun to improvise. |
|
I *finally* have my 510 on the road. New wheels and tires and some fresh paint make it look a whole lot better. Just after this photo was taken I got a "fix-it" ticket for not having a front bumper or licence plate. Figures. Oh yeah, my friends refused to come to San Francisco in my 510, so we're not bringing it. |
|